行为树(Behavior Tree)实践(1)
自从开博以来,每天都会关心一下博客的访问情况,看到一些朋友的订阅或者访问,不胜欣喜,也促使我去写一些更好的博文,来和大家分享和交流,从访问统计来看,有相当一部分是来自于搜索引擎的流量,关键字以“行为树”,或者“Behavior Tree”居首位,我想大家对此可能有些兴趣,加上,这几年反反复复一直在AI中研究和运用行为树,所以这次就来谈谈关于行为树(Behavior Tree)的一些东西,以前也写过一些文章(1,2,3)来讨论行为树,不过已经是一两年前的事情了,较之以前,这次会更为系统,也会添加一些我新的思考和感悟。所谓行为树实践,其实在我脑海里就是Practice in Behavior Tree,没法子,受英文教材影响太多了:)
我想通过一个例子来介绍一下行为树的基本概念,会比较容易理解,看下图:
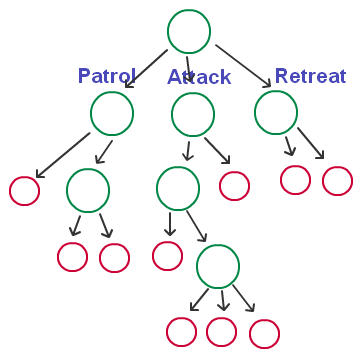
这是我们为一个士兵定义的一颗行为树(可以先不管这些绿圈和红圈是干吗的),首先,可以看到这是一个树形结构的图,有根节点,有分支,而且子节点个数可以任意,然后有三个分支,分别是巡逻(Patrol),攻击(Attack),逃跑(Retreat),这个三个分支可以看成是我们为这个士兵定义的三个大的行为(Behavior),当然,如果有更多的行为,我们可以继续在根节点中添加新的分支。当我们要决策当前这个士兵要做什么样的行为的时候,我们就会自顶向下的,通过一些条件来搜索这颗树,最终确定需要做的行为(叶节点),并且执行它,这就是行为树的基本原理。
值得注意的是,我们标识的三大行为其实并不是真正的决策的结果,它只是一个类型,来帮助我们了解这个分支的一些行为是属于这类的,真正的行为树的行为都是在叶节点上,一般称之为行为节点(Action Node),如下图红圈表示的
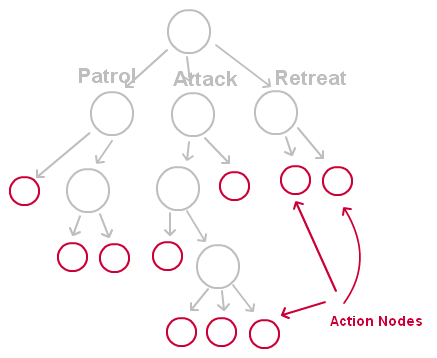
这些叶节点才是我们真正通过行为树决策出来的结果,如果用我以前提到的那个层次化的AI结构来描述的话,这些行为结果,相当于就是一个个定义好的“请求”(Request),比如移动(Move),无所事事(Idle),射击(Shoot)等等。所以行为树是一种决策树,来帮助我们搜寻到我们想要的某个行为。
行为节点是游戏相关的,因不同的游戏,我们需要定义不同的行为节点,但对于某个游戏来说,在行为树上行为节点是可以复用的,比如移动,在巡逻的分支上,需要用到,在逃跑分支上,也会用到,这种情况下,我们就可以复用这个节点。行为节点一般分为两种运行状态:
- 运行中(Executing):该行为还在处理中
- 完成(Completed):该行为处理完成,成功或者失败
除了行为节点,其余一般称之为控制节点(Control Node),用树的“学名”的话,就是那些父节点,如下图绿圈表示
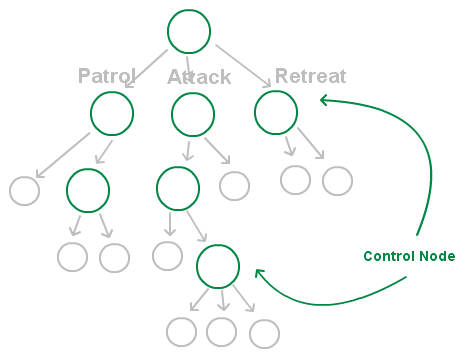
控制节点其实是行为树的精髓所在,我们要搜索一个行为,如何搜索?其实就是通过这些控制节点来定义的,从控制节点上,我们就可以看出整个行为树的逻辑走向,所以,行为树的特点之一就是其逻辑的可见性。
我们可以为行为树定义各种各样的控制节点(这也是行为树有意思的地方之一),一般来说,常用的控制节点有以下三种
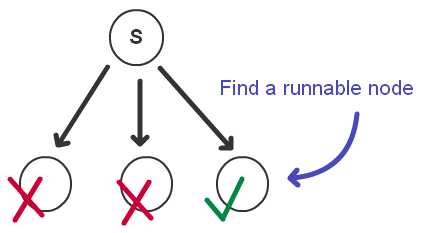
- 选择(Selector):选择其子节点的某一个执行
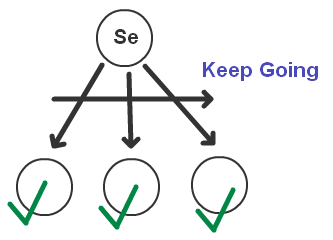
- 序列(Sequence):将其所有子节点依次执行,也就是说当前一个返回“完成”状态后,再运行先一个子节点
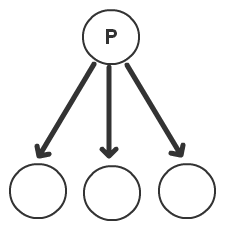
- 并行(Parallel):将其所有子节点都运行一遍
用图来表示的话,就是这样,依次为选择,序列和并行
可以看到,控制节点其实就是“控制”其子节点(子节点可以是叶节点,也可以是控制节点,所谓“执行控制节点”,就是执行其定义的控制逻辑)如何被执行,所以,我们可以扩展出很多其他的控制节点,比如循环(Loop)等,与行为节点不同的是,控制节点是与游戏无关的,因为他只负责行为树逻辑的控制,而不牵涉到任何的游戏代码。如果是作为一个行为树的库的话,其中就一定会包含定义好的控制节点库。
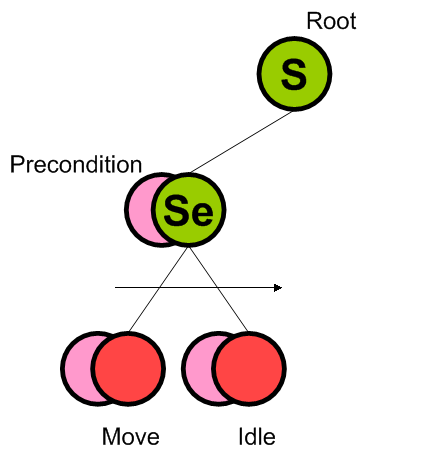
如果我们继续考察选择节点,会产生一个问题,如何从子节点中选择呢?选择的依据是什么呢?这里就要引入另一个概念,一般称之为前提(Precondition),每一个节点,不管是行为节点还是控制节点,都会包含一个前提的部分,如下图
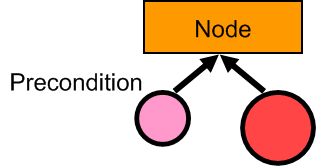
前提就提供了“选择”的依据,它包含了进入,或者说选择这个节点的条件,当我们用到选择节点的时候,它就是去依次测试每一个子节点的前提,如果满足,则选择此节点。由于我们最终返回的是某个行为节点(叶节点),所以,当前行为的“总”前提就可以看成是:
当前行为节点的前提 And 父节点的前提 And 父节点的父节点的前提 And….And 根节点的前提(一般是不设,直接返回True)
行为树就是通过行为节点,控制节点,以及每个节点上的前提,把整个AI的决策逻辑描述了出来,对于每次的Tick,可以用如下的流程来描述:
1 | |
从概念上来说,行为树还是比较简单的,但对AI程序员来说,却是充满了吸引力,它的一些特性,比如可视化的决策逻辑,可复用的控制节点,逻辑和实现的低耦合等,较之传统的状态机,都是可以大大帮助我们迅速而便捷的组织我们的行为决策。希望这次简单的介绍,对大家有所帮助,能力有限,不一定能表述的很清楚,有问题,或者有指教的,都请和我多多交流,最后,我对这个士兵的巡逻分支画了一个示意图,供大家参考:
S — 选择节点 Se — 序列节点